Tiếng Việt
English
Search for:
MENU
MENU
Giới thiệu
Giới thiệu
Lịch sử
Lịch sử khoa
BCN khoa qua các thời kỳ
Cựu sinh viên
Tầm nhìn và sứ mệnh
Cơ cấu tổ chức
Nguồn lực
Tin tức - Thông báo
Thông báo
Tin tức
Hội nghị
Sinh viên
Học bổng
Đoàn TN - Hội SV
Công đoàn
Biểu mẫu
Tài chính nội bộ
Lịch công tác
Bộ môn - PTN
Thiết kế máy
Chế tạo máy
Cơ Điện Tử
Công nghệ Nhiệt lạnh
Kỹ thuật hệ thống công nghiệp
Kỹ thuật máy xây dựng và nâng chuyển
Kỹ thuật dệt may
Thiết bị và Công nghệ Vật liệu Cơ khí
Quản lý và Kỹ thuật Bảo trì
Ban giảng dạy thực hành
PTN CAD/CAM
PTN Công nghệ Tạo hình và Xử lý Vật liệu
PTN Đo lường
PTN Điều khiển và Tự động hóa
PTN Công nghệ Thiết kế và Gia công Tiên tiến
Xưởng cơ khí
Không gian CDIO
Đào tạo
Đại học
Chương trình Đại học
Chương trình giảng dạy tiếng Anh
Đào tạo sau đại học
Thông báo Giáo vụ
GVCN
CDIO
Nghiên cứu
Mục tiêu
Lĩnh vực nghiên cứu
Sản phẩm nghiên cứu
Đề tài nghiên cứu
Hợp tác
Hợp tác quốc tế
Hợp tác trong nước
Tuyển dụng
Thông tin doanh nghiệp
Tuyển sinh
Liên hệ
Cựu sinh viên
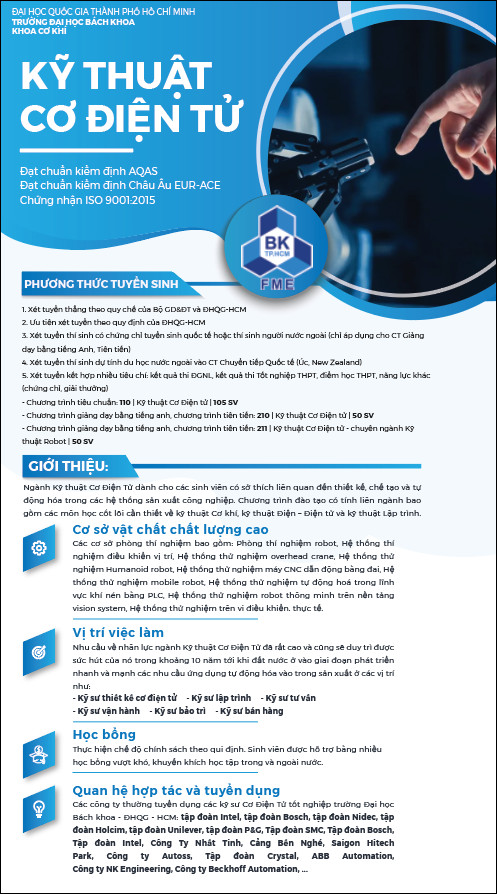
NGÀNH KỸ THUẬT CƠ ĐIỆN TỬ
24/02/2023
24/02/2023
admin-fme
NGÀNH KỸ THUẬT HỆ THỐNG CÔNG NGHIỆP – NGÀNH LOGISTICS VÀ QUẢN LÝ CHUỖI CUNG ỨNG
NGÀNH KỸ THUẬT CƠ KHÍ
Tin mới
Công nhận chương trình PFIEV trong chương trình đào tạo thạc sĩ
2026 Guidelines for Japanese Government Scholarship
Quyết định ban hành Quy định gia hạn thời gian nộp học phí đối với người học tại Trường Đại học Bách khoa – Đại học Quốc gia TP. HCM
Tiếp sức mùa xét tuyển: Trường Đại học Bách khoa tích cực tư vấn trực tiếp cho hàng trăm thí sinh và phụ huynh tại Ngày hội Lựa chọn nguyện vọng xét tuyển Đại học, Cao đẳng năm 2025
65 năm thành lập Khoa Cơ Khí
FACULTY OF MECHANICAL ENGINEERING – HCMUT
CHÀO MỪNG 60 NĂM THÀNH LẬP TRƯỜNG ĐẠI HỌC BÁCH KHOA
PHIM TÀI LIỆU “CDIO – CƠ KHÍ BÁCH KHOA” (2013)
Tấm lòng vàng tài trợ
Thông báo
Công nhận chương trình PFIEV trong chương trình đào tạo thạc sĩ
2026 Guidelines for Japanese Government Scholarship
Thông báo chương trình học bổng Đinh Thiện Lý năm học 2025-2026
Thông báo về việc dự tuyển học bổng khoa Cơ khí năm học 2025-2026
Hội Nghị
Seminar: “The integration of artificial intelligence (AI) with fluid mechanics and complex engineering systems”
Talkshow “Towards Interdisciplinary Research: From the Binary to the Quantum Era” của diễn giả GS. TS. Nguyễn Ngọc Tú
THƯ MỜI THAM DỰ HỘI NGHỊ QUỐC TẾ ICRESM 2025
THACO INDUSTRIES và Khoa Cơ khí – Trường Đại học Bách Khoa, ĐHQG-HCM: Ký kết hợp tác và đồng tổ chức Hội thảo khoa học “Đổi mới công nghệ, hình thành nền tảng sản xuất cơ khí thông minh”
CDIO
Ngày hội Kỹ thuật năm học 2024 – 2025 tại khoa Cơ khí, Trường Đại học Bách khoa – ĐHQG-HCM
THÔNG BÁO SỐ 2 – QUY TRÌNH CHẤM ĐIỂM, DANH SÁCH BAN GIÁM KHẢO VÀ CƠ CẤU GIẢI THƯỞNG NGÀY HỘI KỸ THUẬT NĂM HỌC 2024 -205
THÔNG BÁO SỐ 2 VỀ VIỆC TỔ CHỨC NGÀY HỘI KỸ THUẬT NĂM HỌC 2022 – 2023
Góc doanh nghiệp
Chương trình giám sát tài năng Pepsico 2024
KẾT QUẢ CUỘC THI TÌM HIỂU VỀ NĂNG SUẤT CHẤT LƯỢNG TRONG KHỐI SINH VIÊN TẠI CÁC TRƯỜNG ĐẠI HỌC
AQUA VIỆT NAM ĐỒNG HÀNH CÙNG SINH VIÊN BÁCH KHOA
Học Bổng
2026 Guidelines for Japanese Government Scholarship
Thông báo chương trình học bổng Đinh Thiện Lý năm học 2025-2026
Thông báo về việc dự tuyển học bổng khoa Cơ khí năm học 2025-2026
Tuyển sinh
Tiếp sức mùa xét tuyển: Trường Đại học Bách khoa tích cực tư vấn trực tiếp cho hàng trăm thí sinh và phụ huynh tại Ngày hội Lựa chọn nguyện vọng xét tuyển Đại học, Cao đẳng năm 2025
Hơn 3.500 sĩ tử tập trung tại Trường Đại học Bách khoa cho kỳ thi Đánh giá Năng lực đợt 2
Đề thi tốt nghiệp THPT 2025 chỉ in trên 1 tờ giấy, nhiều môn thi tổ chức cùng lúc trong một phòng
Thống kê truy cập
Picture
More
Picture
More
Picture
More
Picture
More
Picture
More
Picture
More
Picture
More
Picture
More
Picture
More
Picture
More
Picture
More
Picture
More
Picture
More
Picture